پژوهشگران اتریشی، ربات کوچکی ابداع کردهاند که با سرعتی سه برابر بیشتر از یوزپلنگ حرکت میکند. “مارتین کالتن برونر” (Martin Kaltenbrunner)، پژوهشگر “دانشگاه یوهانس کپلر لینز” (JKU) اتریش گفت: این ربات واقعا سریع عمل کرد و صادقانه بگویم که کمی غافلگیرکننده بود. ما نسخه بهتری از یک دوربین پرسرعت را طی روند آزمایش خریدیم، زیرا دوربینی که داشتیم، به اندازه کافی خوب نبود.
پژوهشگران اتریشی، ربات کوچکی ابداع کردهاند که با سرعتی سه برابر بیشتر از یوزپلنگ حرکت میکند.
به گزارش نیوساینتیست، یک ربات کوچکتر از تمبر پستی میتواند با سرعتی سه برابر بیشتر از یوزپلنگ، مسیر خود را طی کند.
“مارتین کالتن برونر”(Martin Kaltenbrunner)، پژوهشگر “دانشگاه یوهانس کپلر لینز”(JKU) اتریش گفت: این ربات واقعا سریع عمل کرد و صادقانه بگویم که کمی غافلگیرکننده بود. ما نسخه بهتری از یک دوربین پرسرعت را طی روند آزمایش خریدیم زیرا دوربینی که داشتیم، به اندازه کافی خوب نبود.
-

محافظ صفحه نمایش لایونکس مدل UPS مناسب برای گوشی هوآوی Y9a بسته سه عددی
خرید محصول -
ادو پرفیوم مردانه بورلی هیلز پولو کلاب مدل ۲ حجم ۱۰۰ میلی لیتر
خرید محصول -
ساعت هوشمند مای کرونوز مدل Zeround Rose Gold-Brown
خرید محصول -
دستبند طلا ۱۸ عیار دخترانه لیردا مدل اسم ثمینه
۱,۰۶۲,۶۷۰ ﷼ انتخاب گزینهها این محصول دارای انواع مختلفی می باشد. گزینه ها ممکن است در صفحه محصول انتخاب شوند -
تونیک بافت زنانه ایزی دو مدل ۲۱۸۱۲۶۸۵۸
۴۹۸,۰۰۰ ﷼ انتخاب گزینهها این محصول دارای انواع مختلفی می باشد. گزینه ها ممکن است در صفحه محصول انتخاب شوند -
پخش کننده خودرو ووکس مدل MZDC100Pro
خرید محصول -
بند چرمی مدل Org مناسب برای اپل واچ ۳۸ میلی متر
خرید محصول -
قلم لمسی یوسمز مدل zb135
خرید محصول








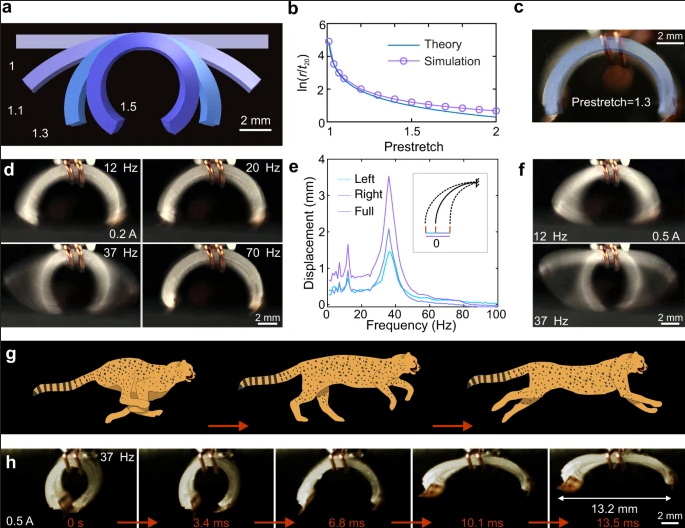
برونر و همکارانش، یک ربات نرم فوق سریع را از یک ماده لاستیکی ساختند و آن را با جریانهای الکتریکی و میدان مغناطیسی کنترل کردند. آنها امیدوارند که در نهایت از این ربات بتوان در حوزه پزشکی و برای رساندن داروها یا انجام دادن اقداماتی در بدن انسان استفاده کرد.
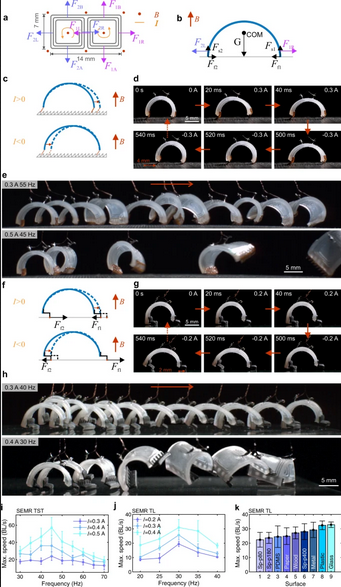
این ربات از یک ماده الاستیک ساخته شده که به شکل U وارونه است و سیمهای فلزی از میان آن عبور میکنند. هنگامی که جریانهای الکتریکی در سیمها با یک میدان مغناطیسی در محیط اطراف ربات در تعامل قرار میگیرند، ربات حرکت میکند.
پژوهشگران، ربات را به سیمهای مسی متصل کردند و آن را در کنار آهنربای بزرگی قرار دادند. همچنین، آنها ربات را در حالت بدون اتصال کنترل کردند و جریان را با یک باتری آغاز کردند که مانند کولهپشتی در بالای ربات نصب شده بود. این گروه پژوهشی، دو شکل مختلف، یکی به شکل L و دیگری به شکل دندانه اره را برای پای ربات آزمایش کردند تا از روشی که چنگالهای حیوانات برای کشش به کار میبرند، تقلید کنند.
“گویونگ مائو”(Guoyong Mao)، از پژوهشگران این پروژه گفت: چندین ماه طول کشید تا یک طرح خوب برای پا پیدا شود اما اکنون ربات میتواند روی هر سطح صافی مانند لاستیک، چوب یا کاغذ راه برود.
ربات چه زمانی که به سیم متصل بود و چه زمانی که باتری را حمل میکرد، توانست بدود، به صورت دایرهای بچرخد، در آب شنا کند، از روی موانع کوچک بپرد و محموله را حمل کند. این ربات در زمان اتصال، سریعترین نمونه بود و بیش از ۱۷ برابر سریعتر از رباتهای نرم پیشین کار کرد.
“کوین چن”(Kevin Chen)، پژوهشگر دانشگاه “امآیتی”(MIT) گفت: این ربات به عنوان یک ربات نرم، توان فوقالعاده بالایی دارد. این بدان معناست که میتواند از قدرت زیادی در بدنه نسبتا کوچک خود استفاده کند. یک ربات با داشتن توان بالاتر میتواند محموله بیشتری را حمل کند و مانورهای تهاجمی مانند پشتک زدن را انجام دهد.
این ربات در حال حاضر میتواند کمتر از نیم ساعت کار کند اما برونر گفت که آنها قصد دارند ربات را مستقلتر کنند. این کار باعث میشود که سرعت ربات در محیطهای مختلف، از جمله برای مقاصد پزشکی کارآیی داشته باشد.این پژوهش، در مجله “Nature Communications” به چاپ رسید.